Create Your First Project
Start adding your projects to your portfolio. Click on "Manage Projects" to get started


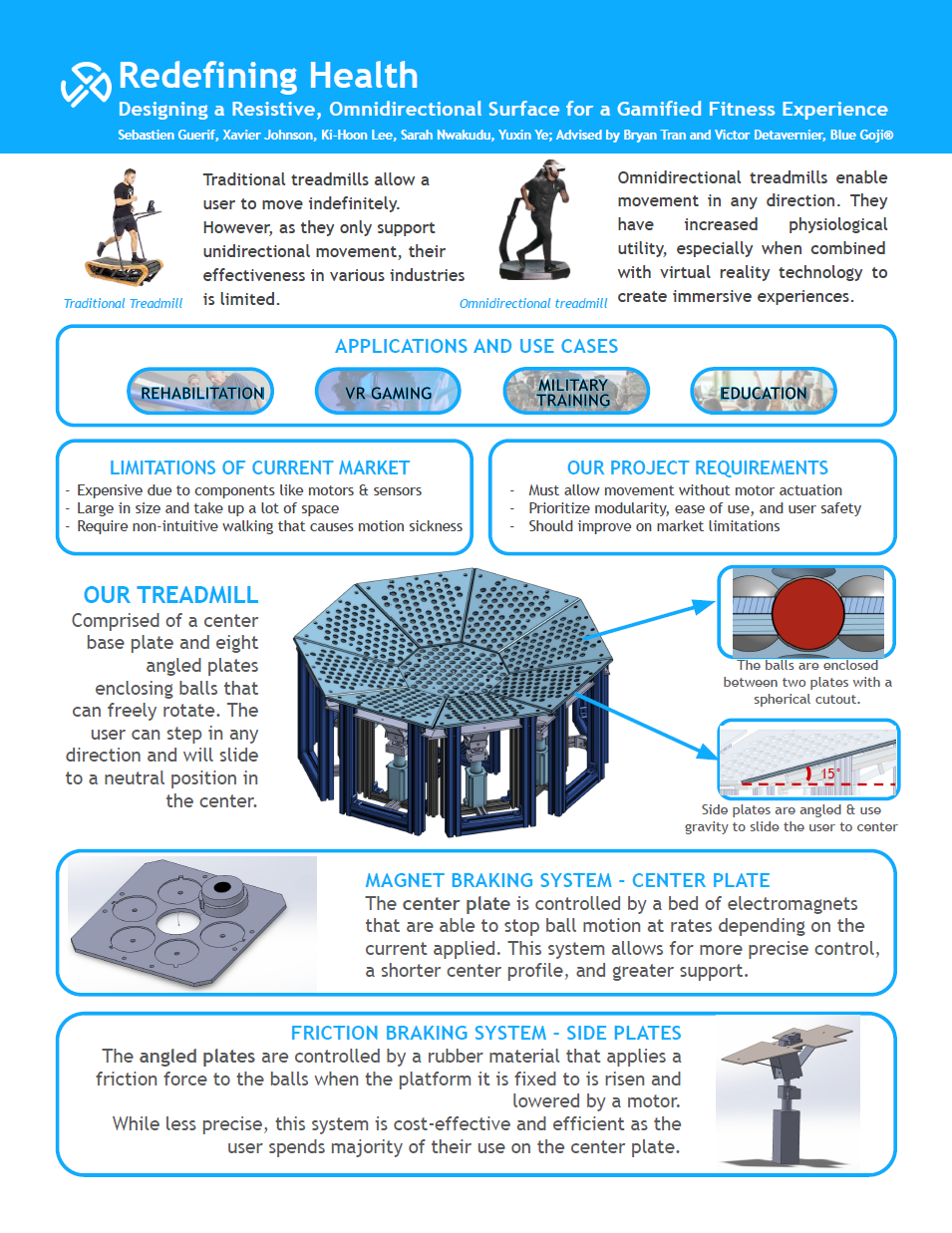
Project: Resistive Omni-Directional Surface
Project type
Capstone
Date
2024-2025
Location
Berkeley, CA
For my capstone project, my group designed a motor-free, omnidirectional surface for immersive VR fitness, aimed at solving the size and cost limitations of traditional motorized treadmills. The platform consists of a center base plate surrounded by eight plates angled at 15 degrees, which use gravity to naturally return the user to a neutral center position.The system utilizes an array of enclosed balls between plates with spherical cutouts, allowing for frictionless movement in any direction. To provide control and resistance, I integrated a dual-braking architecture: a high-precision electromagnetic "Magnet Braking System" for the center plate and a cost-effective "Friction Braking System" using rubber contact for the side plates. This modular design prioritizes user safety and intuitive movement, providing a physiological training tool for rehabilitation, gaming, and military simulation.